Pour déporter la génération des step moteur du PC vers une carte dédiée et donc normalement résoudre les problèmes de latence du PC, j’ai trouvé deux projets qui semblent prometteur
Ils permettraient de garder le cablage actuel et de « juste » remplacer le cable port parallèle par un cable Ethernet et un pico 2040.
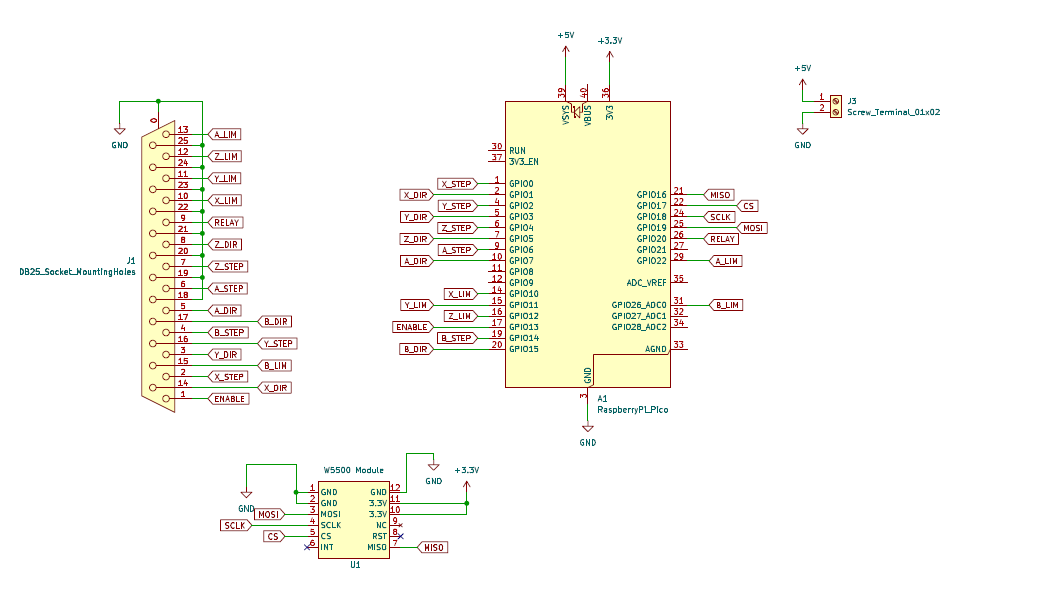
J’ai prepare un fichier de comparaison entre les branchements de la CN de l’Acolab et la mienne. Est ce que cela te suffit pour la configuration du firmware?
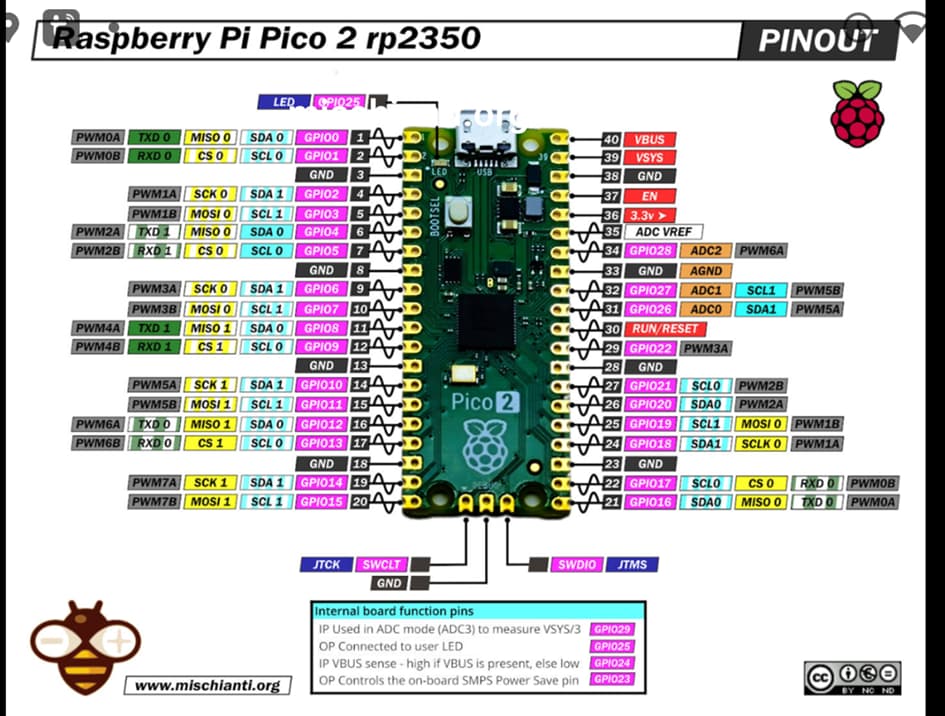
@Thomas : Pour moi je souhaite prendre des pico2 et non des pico, c’est 150Mghz au lieu de 133 et c’est 530KB de RAM au lieu de 264K.
Je ne sais pas si on a besoin de la RAM, mais pour 2€ de plus piece, il me semble que ca ne vaut pas le coup de reflechir longtemps. Es tu certain de vouloir des pico pour l’acolab?
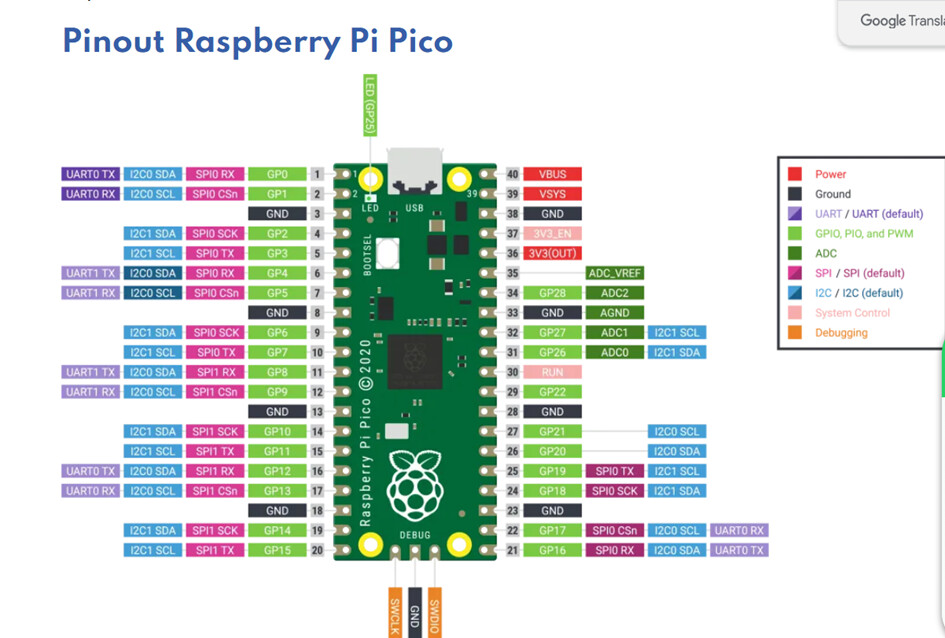
@Thomas: j’ai verifié ca me parait bon. La litterature dit que les pinout pico et pico2 sont identiques, on trouve + de fonction sur les Pin du pico2 mais pour ce que l’on veut faire, on n’ a pas besoin. Je lance donc la commande en pico2, 2 pour l’acolab, 2 pour moi.
Question numéro 1 : Les sorties qui manquent sur ton grobard pico_linuxcnc.pdf seront cablées sur le deuxieme pico, correct? Est ce que ca veut dire que l’on peut mettre autant de cartes que l’on veut a concurence des 9 axes/moteurs possibles de Linuxcnc?
Deuxieme question: Du temps des ports paralleles, on n’avait pas besoin d’equilibrer les 2 cartes car de toute maniere c’etait le Pc qui pedalait. Maintenant que ca va etre le pico qui genere les impulsions, ne vaut il pas mieux equilibrer au moins les moteurs ( pour moi 3 sur une cartes, 3 sur l’autre) et pour l’acolab , si on rajoute l”axz A un jour, 2 sur une carte et 3 sur l’autre? Intuitivement mais sans raison rationnelle, je dirais les 2 moteurs du X sur une meme carte, et pour moi les 2 moteurs du Z sur l’autre.
Salut Thomas. Je passerai à l’acolab Samedi. Je laisserai le materiel dans une boite. Travaillons nous ensemble à l’acolab sur ce sujet, ce serait ma preference, ou fais tu cela chez toi ? ce qui ne m’arrangerait pas car je compte bien faire la meme chose sur ma machine donc j’ai un peu besoin de toi pour demarrer.