Ca y’est nos cartes BAB@Pic sont enfin arrivées, après s’être perdues 15 jours en France, entre Paris et Clermont (les joies de la poste française…).
Bref, j’aurais bien mis une image, mais en tant que nouvel utilisateur je n’ai pas le droit
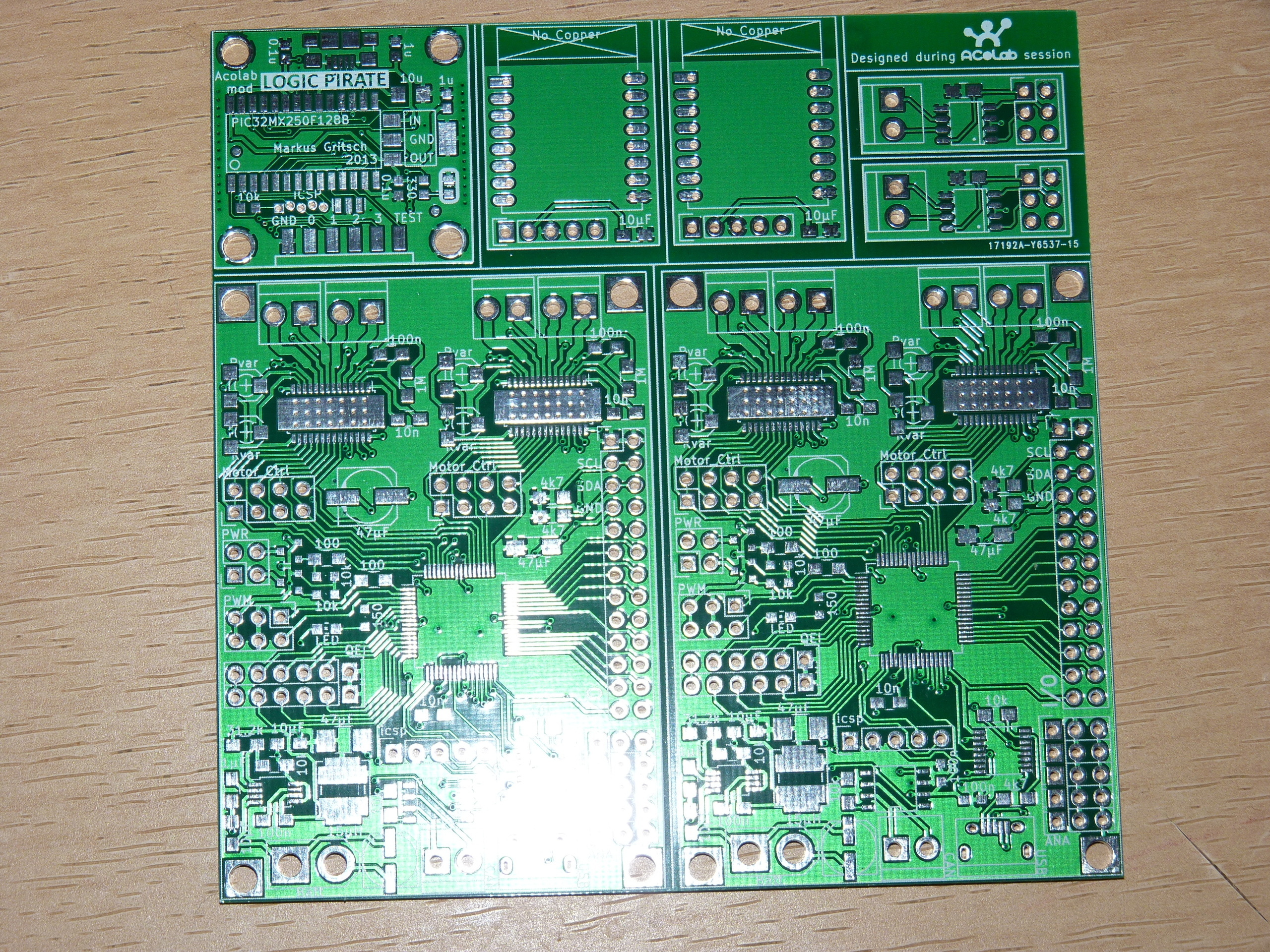
Pour info ce pcb contient en plus de notre BAB@Pic, un routage de la carte Logic Pirate.(http://dangerousprototypes.com/docs/Logic_Pirate). Pour les intéressés il y à au moins 5 pcb de Logic Pirate que je peux donner, y’a plus qu’a souder les composants.
Les 10 PCB en 10*10cm m’ont coûtés 21€ (frais de port compris), commandés le 11/08, arrivés le 24/08 en France, et reçu aujourd’hui.
merci !
c’est une carte que l’on a “développé” avec Bernard et Alex. Elle est un peu “générique” pour faire de la robotique simple (gros microcontrôleur, 4 ponts en H (Texas instrument moteur DC ou PAP) , 6 ou 12 pwm en fonction du microcontrôleur soudé, I2C, SPI, liaison série, USB (avec convertisseur), bus CAN, 2 entrées pour des codeurs en quadrature, 2 sorties “puissance”, quelque entrées ANA, avec un convertisseur DC/DC embarqué pour alimentation directe sur batterie. et deux cartes options, une ESP8266 et une RS485.
la photo :
Désole pour le delai de réponse, j’avais zappé le message.
Beh en fait je n’en sais rien (il faudrait qu’on en parle avec Alex et Bernard) mais surtout : pour le moment rien de debuggué, donc tant qu’on aura pas démarré une carte en s’assurant que j’ai pas fait des erreurs de routage graves, et que tout est OK, ça ne sert a rien de documenter dessus. Par contre, par la suite si tout est OK, et qu’on trouve la carte “pratique” je ne pense pas que ça pose de probleme de la rendre “open” ^^. Du coup on en reparle quand tout sera soudé (mais d’abord il faut qu’on commande nos composants… :D)
Aucun inconvénient pour que la carte soit open source. Il va falloir qu’on l’éprouve un peu pour les problèmes de routage et les composants. Ben est plutôt bien avancé sur le soudage :). Donc nous pourrons faire un premier retour dans les semaines qui arrivent.
pour le moment une erreur grossiere de routage sur le convertisseur de tension, et meme apres la correction le convertisseur ne régule pas comme il faut, sans que je ne sache pourquoi. Donc en l’état la carte ne fonctionnera pas (on fera des bidouille pour nous, mais aucun interet d’en edétailler le fonctionnement sans avoir rerouté une nouvelle version avec les modifs d’alim.)
Aucun doute que tu va trouver, mais du coup, en publiant un minimum, même en draft buggé, ça permettrait peut-être à d’autres de jeter un œil et de trouver des pistes.
Voir en farfouillant dans la thématique de trouver d’autres ‘choses’ liées a ce projet qui pourraient être utiles pour ta V2 (genre des montages basés sur la même famille de SOIC/CPU qui utilisent des fonctions ‘astucieuses’)
Pas besoin d’entrer dans les détails, un schematic avec les noms de signaux peut déjà faire voire le mollet de la mariée sans qu’on touche à la jarretière (désolé, j’avais pas d’autre idée d’analogie)
Bonjour Etienne,
Comme indiqué dans le titre Smart-prototyping (.com)
Les boards en 5cmx5cm sont au meme prix que les 10cmx10cm.
Attention cependant au delai de livraison une fois arrivé en france…