J’ai installé leur logiciel PoMoCo, j’ai réussi à me connecter à la carte.
Par contre, impossible de faire bouger les servos, probablement parce que je n’alimente que par l’USB du PC.
La batterie a gonflé, il faudra trouver une alim 5V ou 4 piles et un boitier.
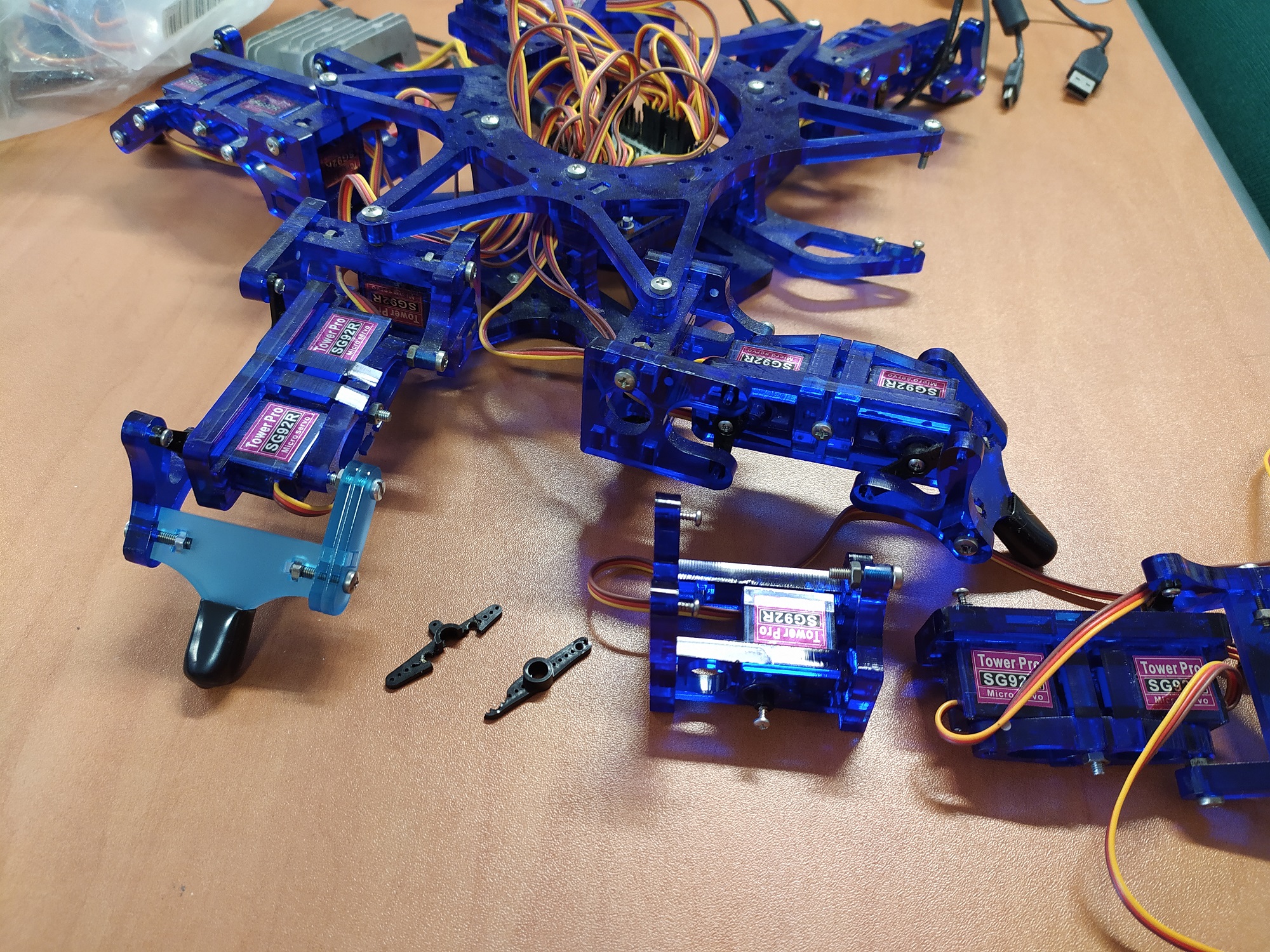
Mécaniquement, il y a un servo qui a le palonnier cassé, ça doit pouvoir se trouver facilement et une patte dont il manque le bout (à modéliser et à imprimer)
j’en ai. J’amènerai ce que j’ai mercredi 1er juillet et on cherchera si j’en ai qui vont. A savoir, chaque marque de servo a son propre standard pour l’entrainement du palonier.
Sur le bras articulé, nous avons mis en place la rotation du bras sur un deuxième Joystick, et un « axe Z » qui gère cette rotation.
Ci-joint le fichier. 200902_Sweep.ino (3,2 Ko)