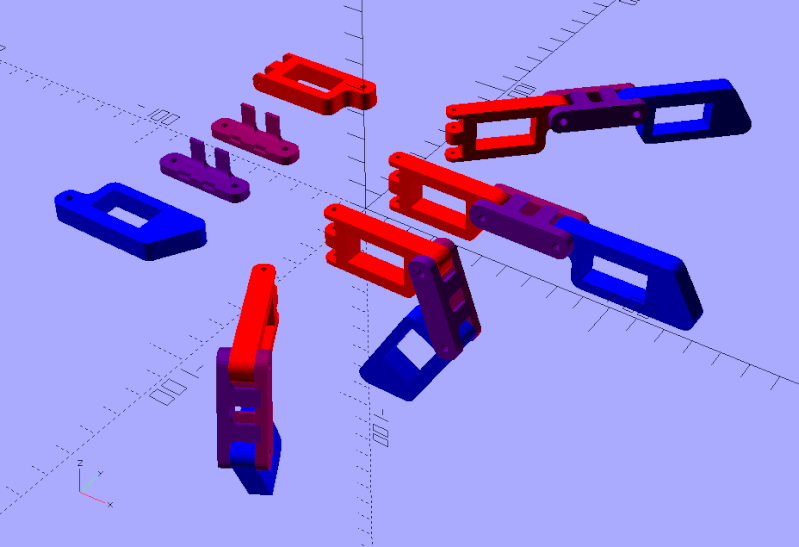
J’ai découvert que des pièces de Stubby existent déjà au format .stl dans un zip disponible sur http://stubby.digitalcave.ca/stubby/files/3dprint.zip (info trouvé en bas de la page https://hackaday.io/project/770-stubby-the-teaching-hexapod)
Il y a aussi des plans au format .dxf sur https://github.com/thebiguno/stubby/tree/master/frame
En discutant de ce projet avec un collègue de boulot qui envisage de se le fabriquer, une nouvelle piste est apparue, le faire en découpe laser.
Dans tout les cas, il faut le redessiner si on veut faire quelque chose de bien, car le plan d’origine est en fractions de pouces, ce qui est source de galère.
Du coup, la première étape consiste à dimensionner vaguement la taille de l’engin qu’on désire, ensuite estimer la masse, pour enfin trouver quels servos moteurs seraient adapté tout en restant dans un budget le plus réduit possible.
Pour ce qui est de la taille, en se basant sur un import du .dxf dans FreeCAD, j’arrive à un diamètre du cercle de 90mm en passant par les articulations de coccyx.
En longueur de fémur, je trouve 49 (entre points de rotations)
En longueur de tibia, ça fera 40mm (entre points de rotations)
pour le pied, entre son axe de pivot et l’extrémité, 57mm
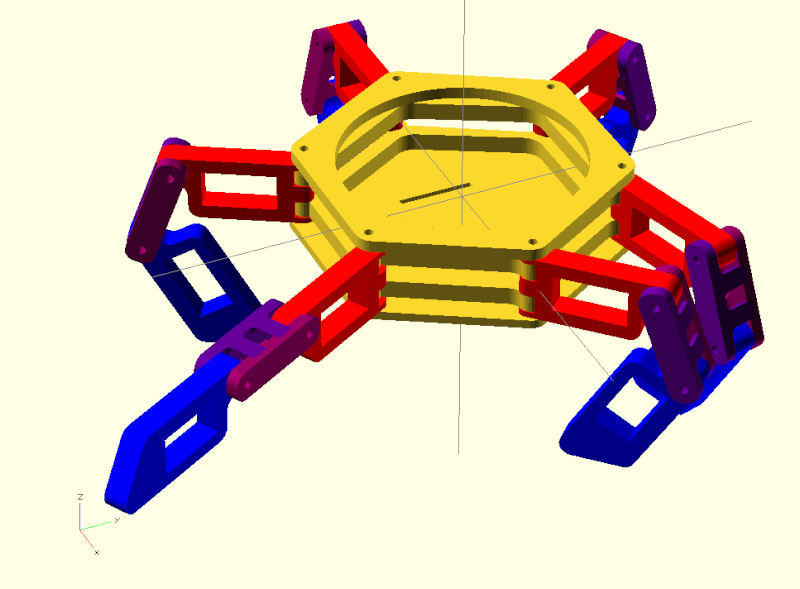
Donc en ‘envergure’, ça donne
90 + 2x(49+40+57) = 382mm
Au niveau du dimensionnement, il faut prendre en compte la force nécessaire aux servos pour soulever le tout.
En principe, la masse repose au minimum en trois points.
Le servo qui à le plus d’efforts à reprendre est celui qui commande la monté/descente du ‘fémur’.
Les servos de ce type travaillent en rotation et son caractérisés par une vitesse de rotation (donnée à vide dans les spécifications) et un couple maxi (celui indiqué dans les fiches est en général le couple de blocage)
Sur une très grande partie de ces servos, la course standard est de 45° de part et d’autre, donc, 90° de débattement total.
Là ou le servo du femur est le plus sollicité, c’est quand la patte est totalement étendue, avec tout les points alignés.
Ça correspond à un bras de levier qui vaut :
longeur femur + longeur tibia + longeur pied.
Sur le Sttuby d’origine, ça fait 146mm
En considérant que l’ensemble mécanique qui entraine le femur de haut en bas soit directement relier au servo, on peut en obtenir un couple.
Si on fait un entrainement mécanique non direct, par exemple avec une biellette qui va faire un débattement de la jambe de fémur de 30° de part et d’autre pour un mouvement de servo de 45°, on gagne en couple (au détriment de la vitesse), mais on risque d’augmenter les déformations et approximations.
Bon, tout ça reste à mathématiser pour trouver la ‘formule globale’, pour aboutir à une taille de servo adaptée.
Ceux prévus sur le Sttuby d’origine sont des ‘TGY9z’, des servos dit ‘9 grammes’ à pas cher (2€30).
Dans ce domaine, on en a pour son argent…
Il est donné pour un couple de 1.7Kg.cm (sous 6 volts) et une vitesse de 0.12s/60°, mais surtout, sur la fiche du vendeur indiqué, il est clairement indiqué qu’il à une très mauvaise durée de vie !
Pour pas beaucoup plus cher dans ce gabarit on trouve les HXT900 qui sont un cran au dessus à 2€90.
Si on veut mieux dans ce format (par exemple pignons métal et montés sur roulement à billes), les prix montent très vite.
Après, il y a plusieurs autres modèles, mais ça sera à voir en fonction du poids à soulever et des longueurs de pattes…
Mais dans la taille de servo au dessus, j’ai repéré par exemple ce modèle à 3.77€ sur roulements et pignon métal http://hobbyking.com/hobbyking/store/__23485__HobbyKing_8482_HK15178B_Digital_Servo_MG_13_5g_1_5kg_0_08s.html
On peut aussi faire ‘un mix’, car si bien réalisés, les articulations de coccyx ne nécessitent pas un gros servo, et de part le bras de levier plus faible, au niveau du pied, il est probable qu’un format ‘9g’ suffise.
Je verrais bien une structure un peu plus grande que l’original (monter à 450mm d’envergure par exemple), avec des HXT900 au coccyx/pied, et des HK15178B au fémur.