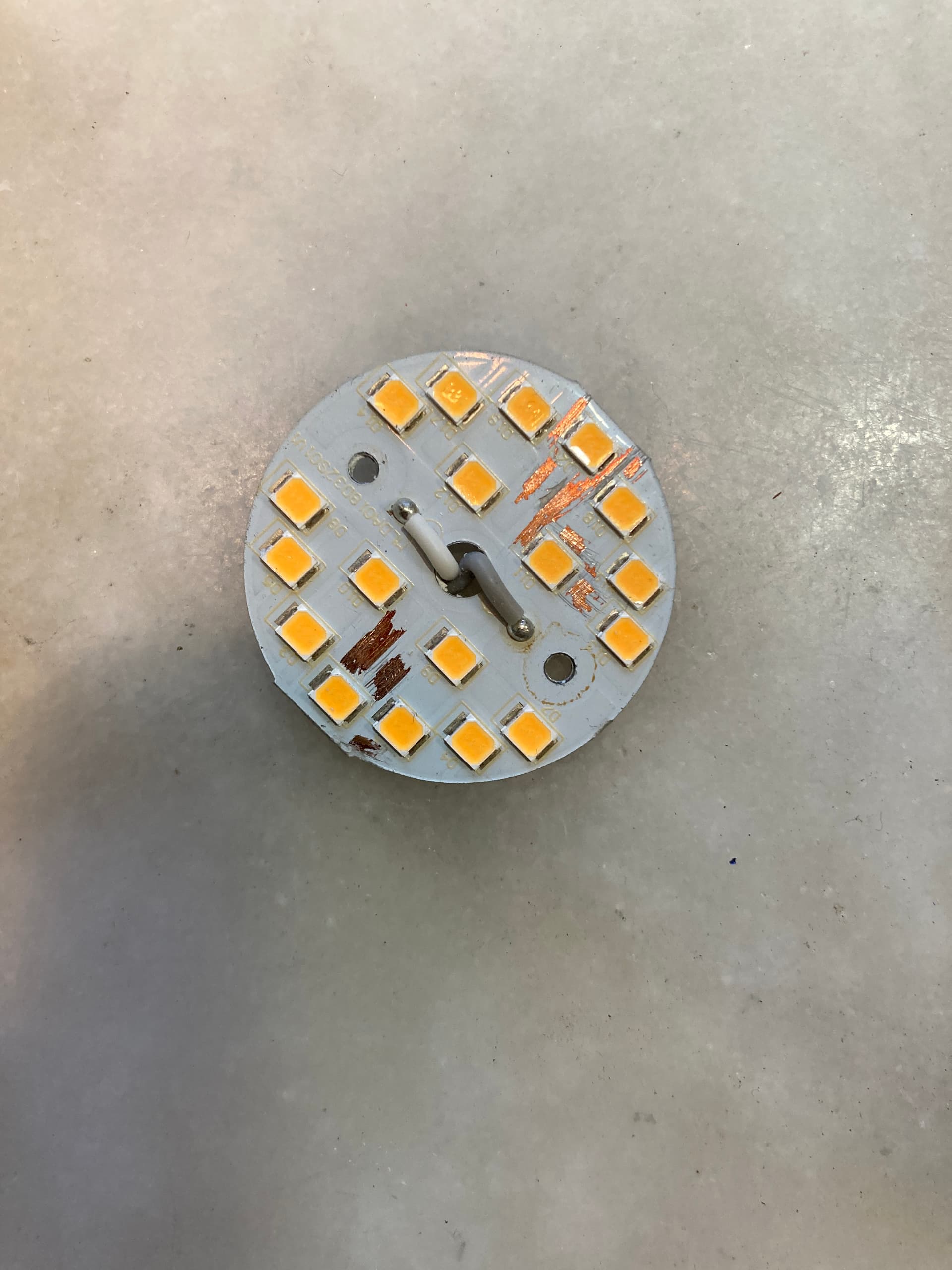
exactement : chaque petit carré orange c’est une led smd en je sais pas quelle tension ??? mais pas 220 ![]() une seule ou un autre composant est hs
une seule ou un autre composant est hs
Et certaines fonctionnent en haute fréquence !
Pourquoi ? Mystère…..![]()
On est limite Hors Sujet là… Pour remettre dans le sujet et faire très très court ; Comme évoqué au-dessus par rapport au choix d’une résistance, c’est bien le courant qui est l’élément critique qui est la limite de la led.
La tension à ses bornes est “une conséquence” de sa constitution.
Et quand on veut alimenter des leds pour une application tel qu’un éclairage 220V, on va mettre ‘X’ leds en série et utiliser un composant qui contrôle le courant, souvent dénommé ‘driver’ qui va réguler à la valeur souhaitée.
Pour faire cette régulation, la méthode la plus efficiente est une régulation PWM (par largeur d’impulsion), et elle est faite à haute fréquence. (Sur certains modèles, ça peut ‘entrer en résonance’ avec, par exemple, des variateurs de puissance et générer des clignotements très désagréables, mais c’est un autre sujet)
Pour en revenir au sujet, sur certaines broches de sortie des Arduino, il y a la possibilité de faire du PWM, donc de ‘doser la puissance de sortie’.
Par contre, pas de régulation ici, car il n’y a pas facilement de moyen de connaitre le courant de sortie, et créer une boucle de régulation interne pour ajuster le rapport cyclique.
C’est pour celà que sur des applications simple, on conservera une résistance talon pour limiter le courant dans la led. (Et comme ça, on peut utiliser toute la plage de valeurs du PWM dans l’Arduino sans s’inquièter)
Une page de ressource plutôt bien foutue ici >> PWM arduino : fréquence, broches de sortie, exemple de code
ooh p… je suis pas arrivée ![]()
Ou en est la bête ? Le projet m’intéresse …![]()
le code est presque fini
et maintenant que je sais souder ça ne saurait tarder !
je l’apporterai pour les curieux
liste de courses pour ceux qui veulent en faire une :
boite en bois gifi 4 euros
peluche gifi 4 euros
2 moteur pas à pas recup
interrupteurs (j’en ai en rab)
et divers arduino led et fils
Est-ce que des servomoteurs de petite qualité comme ça suffisent , Ou bien il faut des choses plus sérieuses avec davantage de couples et plus précis ?
je dirais que oui mais je suis pas suffisamment experte, en tout cas c’est avec deux dans ce genre là que je tente ma chance
1 « J'aime »
Je vais sagement et patiemment attendre ton retour d’expérience… pour gagner du temps !
Ne lâche rien ! Et en tout cas merci pour les conseils.
Des servos ‹ 9G › suffisent pour ce type d’application, tant que personne ne force dessus…
Un poil plus robustes, en pignons métal, tu as ce genre là.
Dans les infos technique, il est précisé :
Couple : 4,8 V et 1,6 kg-cm ; 6,0 V et 1,8 kg-cm
On parle du couple de blocage… quand tu arrives vers 75% de cette valeur, le servo ralenti significativement.
Pour celles ou ceux pas a l’aise avec la notion de couple, ça veut dire que sous 5V (sous condition que l’alimentation puisse fournir le courant nécessaire), tu vas avoir 1.6Kg de force en reliant quelque chose à 1cm du point de rotation.
Si on utilise une tige pour transformer le mouvement, ça veut dire qu’avec une course de 180° au servo, ça fait une course équivalente de 2cm.
La géometrie fait que quand le bras est à 90° de la tringlerie, tu as les 1.6Kg-force, et encore plus vers les fin de course (pour ajouter un peu de math, c’est une fonction ‹ sinus/cosinus ›)
Donc ensuite, selon les bras de leviers de ton couvercle et de la tringle, tu redivises pas le rapport entre course du servo et porte.
Exemple : avec une porte de 5cm qui bouge sur 90°
1.6 Kg/cm => 1cm/5cm => 0.32kg force au bout de la porte (- moins le poids de ton couvercle)
Mais si ton entrainement mécanique est optimisé pour exploiter toute la course du servo, le rapport des bras de levier pour passer de 180° au servo vers 90° a la porte va multiplier le couple par 2
Donc 600grs force environ quand la porte sera à mi chemin.
Si l’appareil est destiné à être mis entre les mains de personnes qui forcerait dessus, il est pertinent d’ajouter un ‹ débrayage › dans la tringle… autant pour protéger le servo, mais aussi pour éviter qu’il ne s’arrache ! (parce que si je force à 2kg, ça bloque le servor, mais surtout, les 2Kg s’appliquent sur sa fixation.
Merci pour toutes ces explications toujours intéressant de comprendre pourquoi on fait tel ou tel choix !
Si l’appareil est destiné à être mis entre les mains de personnes qui forcerait dessus, il est pertinent d’ajouter un ‹ débrayage › dans la tringle… autant pour protéger le servo, mais aussi pour éviter qu’il ne s’arrache !
Et excellente suggestion , car c’est pour offrir à un gosse de trois ans …Mieux vaut prévenir que guérir !
Pour moi une force s’exprime en Newton… donc quand tu parles de kilos ça veut dire que à un centimètre de son axe de rotation le servo est capable de soulever ou pousser un poids de 1,6 kilos ?
Oui oui, j’ai bien essayé d’utiliser le terme kilogramme force qui bien qu’obsolète permet de simplifier les choses, mais oui, si tu veux le mathématiser, en effet, les 1.6Kgf.cm deviennent : 15.7 N.cm
Comme j’ai pris un raccourci en parlant de fonction sinus/cosinus, mais comme la tringle qui convertira le mouvement de rotation en un mouvement linéaire n’a pas un point d’application toujours dans la projection du pivot (en version simple, l’angle de la tringle change au fur et à mesure du mouvement), si tu es puriste, selon l’angle, il y a un delta à ajouter au mouvement linéaire résultat. Mais bon, ce n’est clairement pas significatif ici.
Dans la pratique, @pinatl pourra confirmer je pense, on se débrouille pour surtout avoir la course totale de l’élément contrôlé qui correspond au plus près de la course complète du servo sans que ça coince..
Après, il y a des cas ‹ rigolo ›, comme les servos d’ailerons ou on décale volontairement le neutre mécanique pour obtenir des courses volontairement asymétrique.
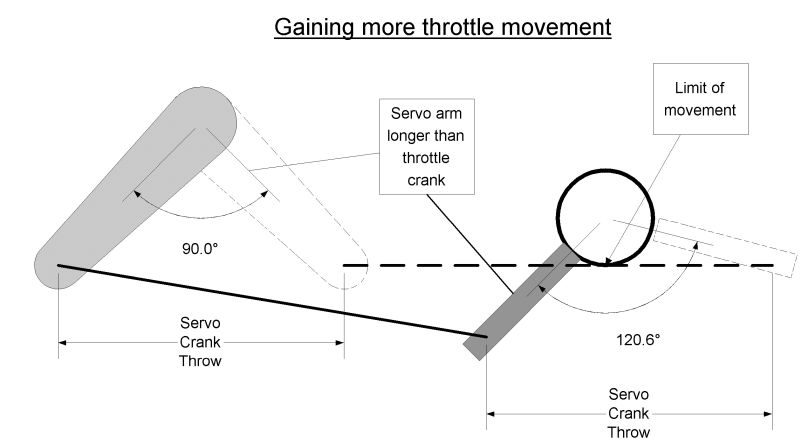
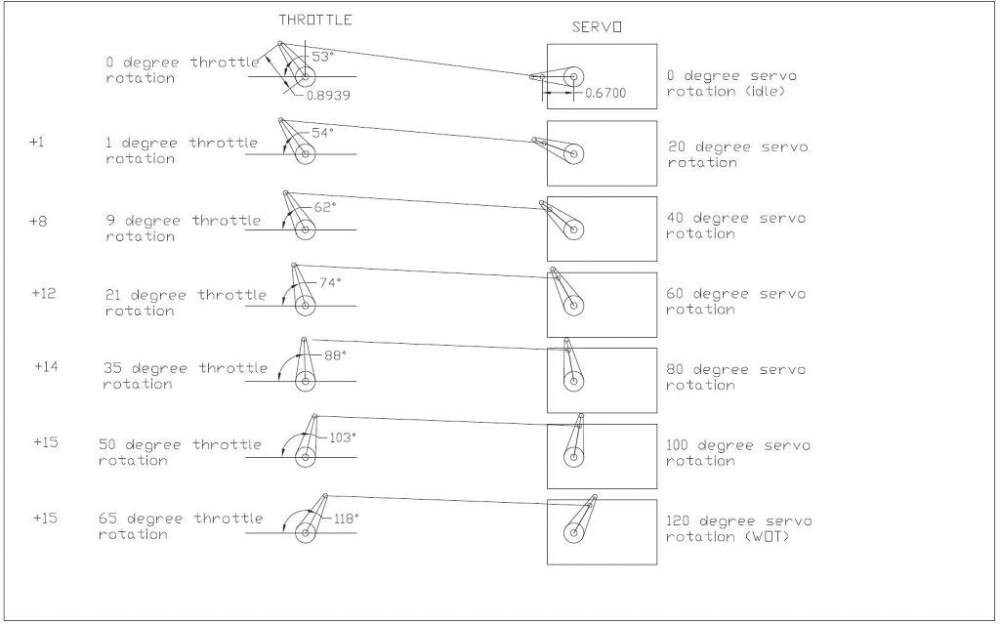
Ou comme ici, un ‹ décalage volontaire › (déphasage de la fonction cosinus) pour bénéficier d’une plus grande précision de positionnement d’un côté ou de l’autre (c’est pour piloter un carburateur, on a besoin d’un ajustement plus précis sur la position ralenti que sur la position plein gaz)
1 « J'aime »
Valeurs de couple données constructeur … et constructeur chinois … ![]()
Il y a assez de place et on se fiche du poids aussi des servos standard seraient possiblement plus appropriés ???
Très sincèrement, vu l’usage, je n’en vois pas l’intérêt… Tu ne veux pas faire une guillotine à doigts ?
Le ‹ 9Grs › est suffisamment puissant pour soulever un petit couvercle en bois.
Pense aussi qu’en cas de blocage, intentionnel ou pas, tous les efforts vont se reporter sur la tringlerie et la fixation du servomoteur (la charnière de la trappe devrait largement supporter)
Qui dit servo plus puissant, dit aussi de dimensionner le reste en fonction.
Et les 1.6Kg.cm-force chinois sont relativement fiables ici (il peut y avoir 10% d’erreur, mais ça ne sera pas du simple au double)
On évoquait donc une fonction de ‹ limiteur d’effort ›, aussi bien pour réduire les risques de destruction de la tringlerie, du servo ou de l’arrachement des ses fixations, mais ça trouve tout son sens pour éviter aussi d’écraser des petits doigts…
Un simple ‹ ressort push-pull › dans la tringle peut faire l’affaire, un truc dans ce style HSP 60050 Lien de frein RC ÉCHELLE 1/8 NIRO POWER UNIVERSEL ENERGIE sans balais - AliExpress 26 mais il existe différents systèmes plus compacts dans le commerce, par exemple ici https://fr.aliexpress.com/w/wholesale-servo-saver.html
Il existe déjà des schémas de toute la tringlerie ou alors il faut la réinventer ?
Je pensais plus à la force necessaire pour basculer l’interrupteur qui en plus d’être relativement dur est loin … le « poids » necessaire peut se mesurer en faisant basculer l’interrupteur en l’appuyant sur une balance
La tringlerie du bras semble être un simple arc de cercle ; une cinématique plus sophistiquée serait plus sympa mais plus complexe …