Samedi, nous avons installé (provisoirement) la shapeOko et son PC à côté de sa grande soeur CNC.
J’ai mis une clé wifi qui traînait chez moi pour la connexion internet.
Le calibrage a l’air correct.
Voici les valeurs des paramètres dans Grbl 1.1f au cas où ils se perdent un jour: $0=10 $1=25 $2=0 $3=0 $4=0 $5=0 $6=0 $10=1 $11=0.010 $12=0.002 $13=0 $20=0 $21=1 $22=1 $23=0 $24=3000.000 $25=1500.000 $26=250 $27=5.000 $30=1000 $31=0 $32=0 $100=87.221 $101=87.221 $102=643.087 $110=6000.000 $111=6000.000 $112=300.000 $120=1000.000 $121=1000.000 $122=250.000 $130=200.000 $131=200.000 $132=200.000
câble en 22AWG voire 24AWG 4 conducteurs blindés. J’ai un peu de mal à trouver un câble correct et pas trop cher. On doit pouvoir prendre le même pour la RigidBot
Je pense que si. C’est un problème connu avec GRBL. Les fils des fin de course “ramasse” la pollution électromagnétique et ça fait déconner GRBL. Si on prends du 28 AWG blindé pour les fin de course, je pense pas que ce soit trop gros ? Ou sinon on prends des chaînes portes câbles plus grosses.
En fait c’est plutôt un problème de contact. Les fins de course sont des lames qui oscillent de façon arbitraire lors de l’ouverture/fermeture et c’est pas en blindant les fils qu’on améliore les choses. Le mieux c’est de mettre un condensateur directement au borne du contact si le logiciel ne gère pas l’anti-rebond.
Et ci c’est réellement un problème de longueur de fil il suffit de mettre des résistance de pull-up plus faible à la sortie de la carte voir un simple RC à l’entrée de celle-ci.
Je suis d’accord dans le cas où la détection de la fin de course est aléatoire. Le problème que j’évoquai est plutôt lié à la pollution électromagnétique lié aux signaux de hachage des moteurs. Il se manifeste par la détection d’une fin de course par GRBL alors que le châssis n’est absolument pas en fin de course.
Normalement le blindage des câbles moteurs devrait suffire mais je pense que 2 précautions valent mieux qu’une.
N’hésitez pas à faire la liste de ce qu’il faut acheter pour remettre la machine en état et l’amélioré.
Si on rachete une carte GRBL, ne serait-il pas mieux de passer à une Smoothieboard (ou sa version chinoise) ? Normalement c’est plus performant et ça permettrait de tester sur une machine.
L’année dernière j’avais acheté un “CNC Shield v3” pour remplacer le shield actuel. On peut tourner avec ça un moment et l’upgrader plus tard. J’imagine que le passage à une Smoothieboard se fait sans trop de difficultés.
concernant les fin de course: il n’y avait que 2 entrées branchées sur l’arduino. En X avec les 2 fins de courses en série et contacts normalement fermés. Pareil en Y.
Pour continuer sur les fins de course, avec @francois nous proposons de rester sur la logique NF avec les capteurs des 2 extrémités en série vers 1 entrée de l’Arduino.
Ce qui nous fait 0V en entrée quand le chariot est en fin de course, 5V sinon.
Ceci sur X et Z.
Sur Y, il y a 2 moteurs qui peuvent être gérés indépendamment pour agir sur l’équerrage. On peut donc prévoir 2 entrées en Y.
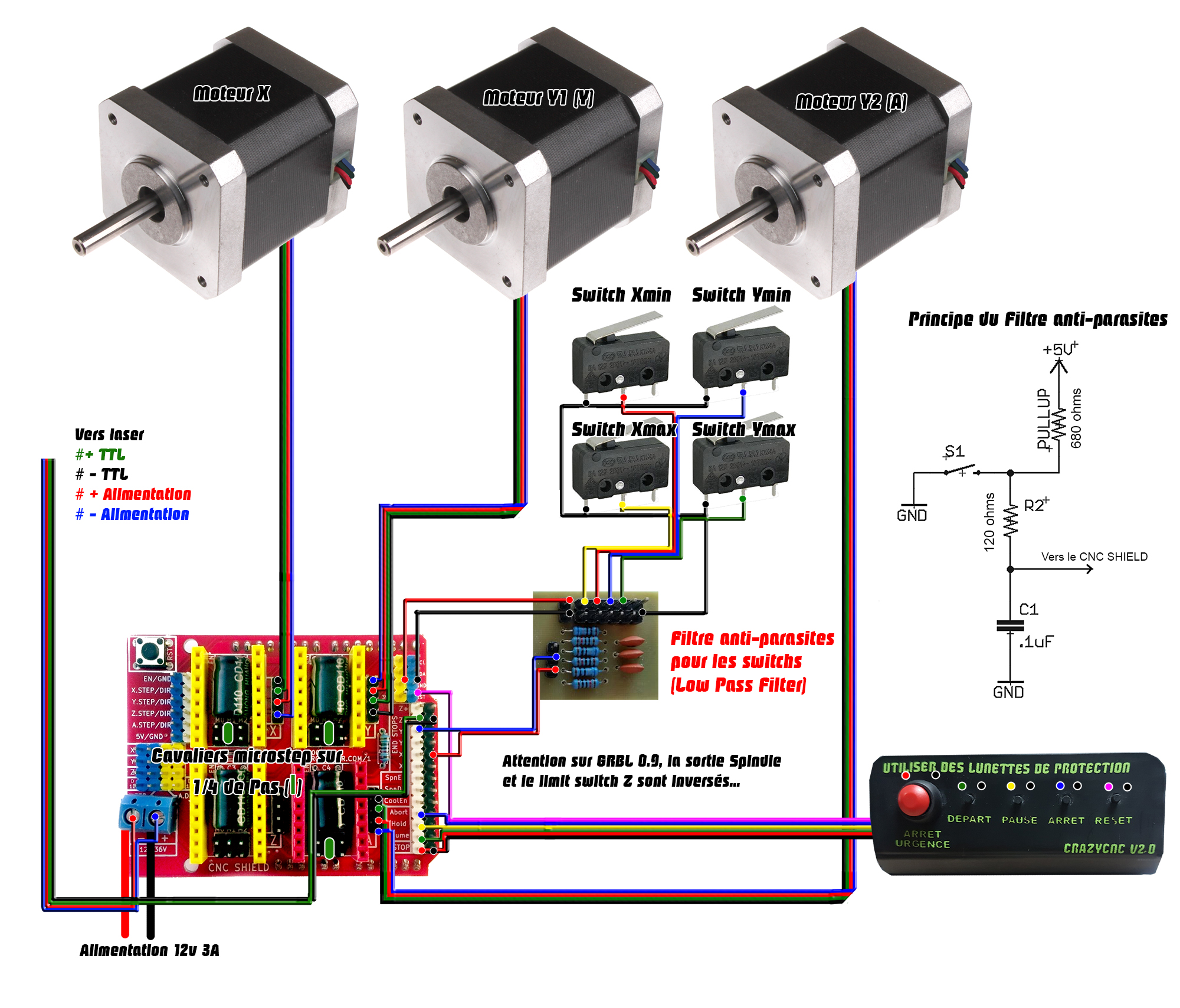
Pour chaque signal, on passera par un filtre anti-parasites donné dans l’image au-dessus.
J’avais évoqué d’utiliser du Normalement Fermé l’année dernière, mais je n’avais pas précisé un truc à envisager… : ajouter des résistances de pull-up ‘un peu plus franches’…
Il est probables que les pull-up d’entrées de l’Arduino soit de l’ordre de 20Kohms. Si l’alim le permet, ne pas hésiter à ajouter une 10K voir même une 3.3K sur les lignes, ça permet d’avoir une meilleure immunité vis à vis des CEM (en contre parti d’une conso plus importante)