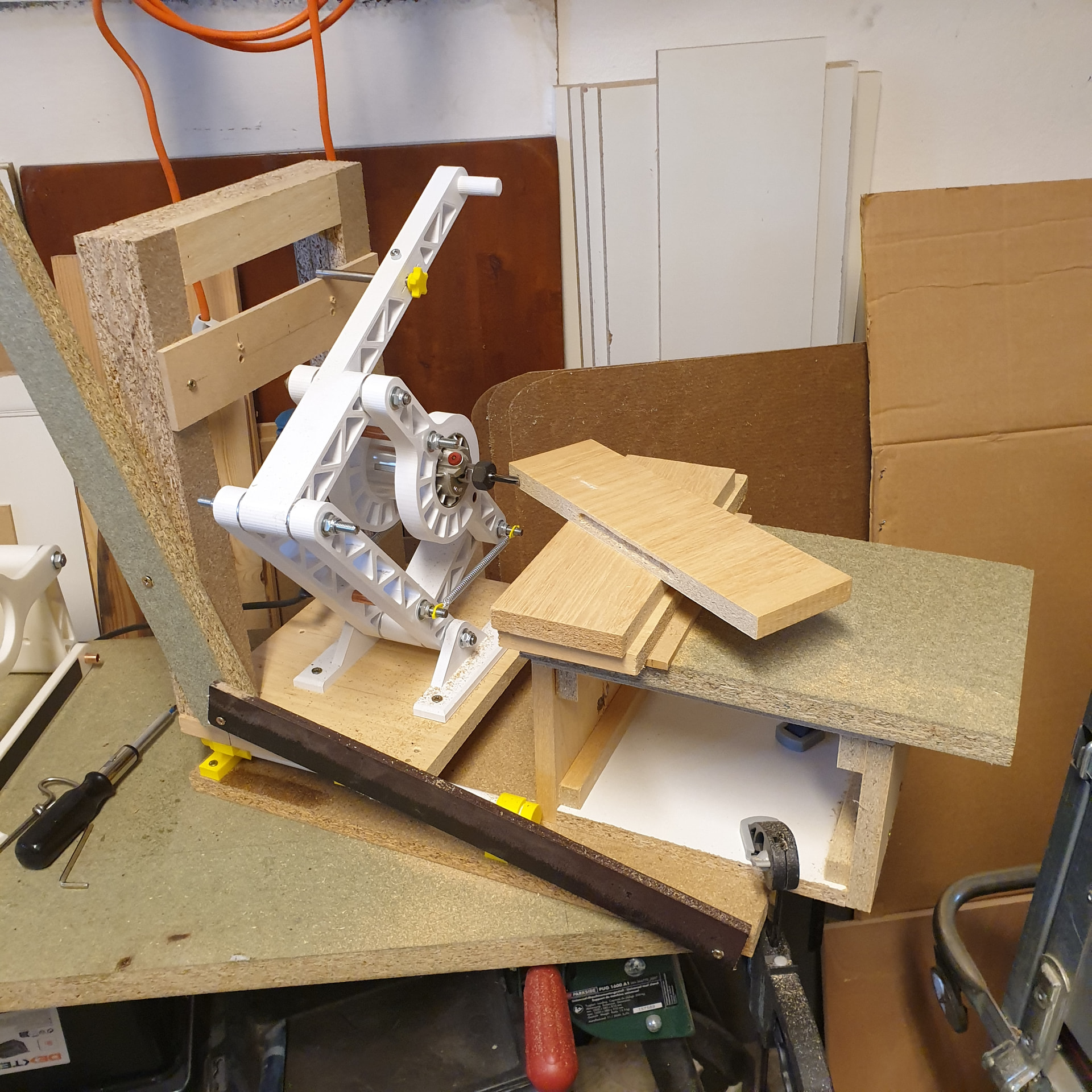
J’ai commencé à bosser un peu sur les plans du pantorouter. L’idée est d’avoir une idée précise des coûts avant de le proposer au régulectif.
Je suis parti des plans fournis par Thierry. GitHub - JohnFrei/Pantorouter: Plans for a Pantorouter · GitHub
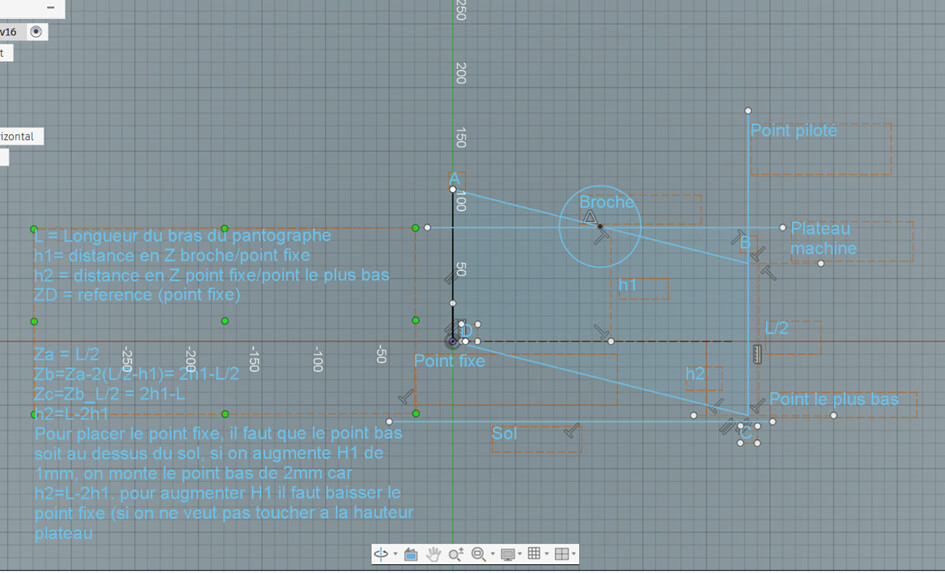
Quelques définitions nécessaires pour comprendre la suite.
Point fixe = point du pantographe fixe par rapport au bâtit
Point piloté = point qui pilote les 4 branches autour du gabarit
Point broche = point central de la broche. Les mouvements de ce point sont à ½ en X et Z des mouvements du point piloté.
Sol = plan sur lequel repose la machine en considérant que le dessous n’est pas fermé.
Point le plus bas = Comme son nom l’indique, le point le plus bas est le point du pantographe en Z mini dans ses mouvements. Ce point est obtenu quand le petit brin L/2 du pantographe est vertical. Compte tenu que le bras physique fera de l’ordre de 40mm de largeur, ce point doit être au moins en Zm du sol avec Zm = 40/2+ 4mm de jeu = 24mm mini.
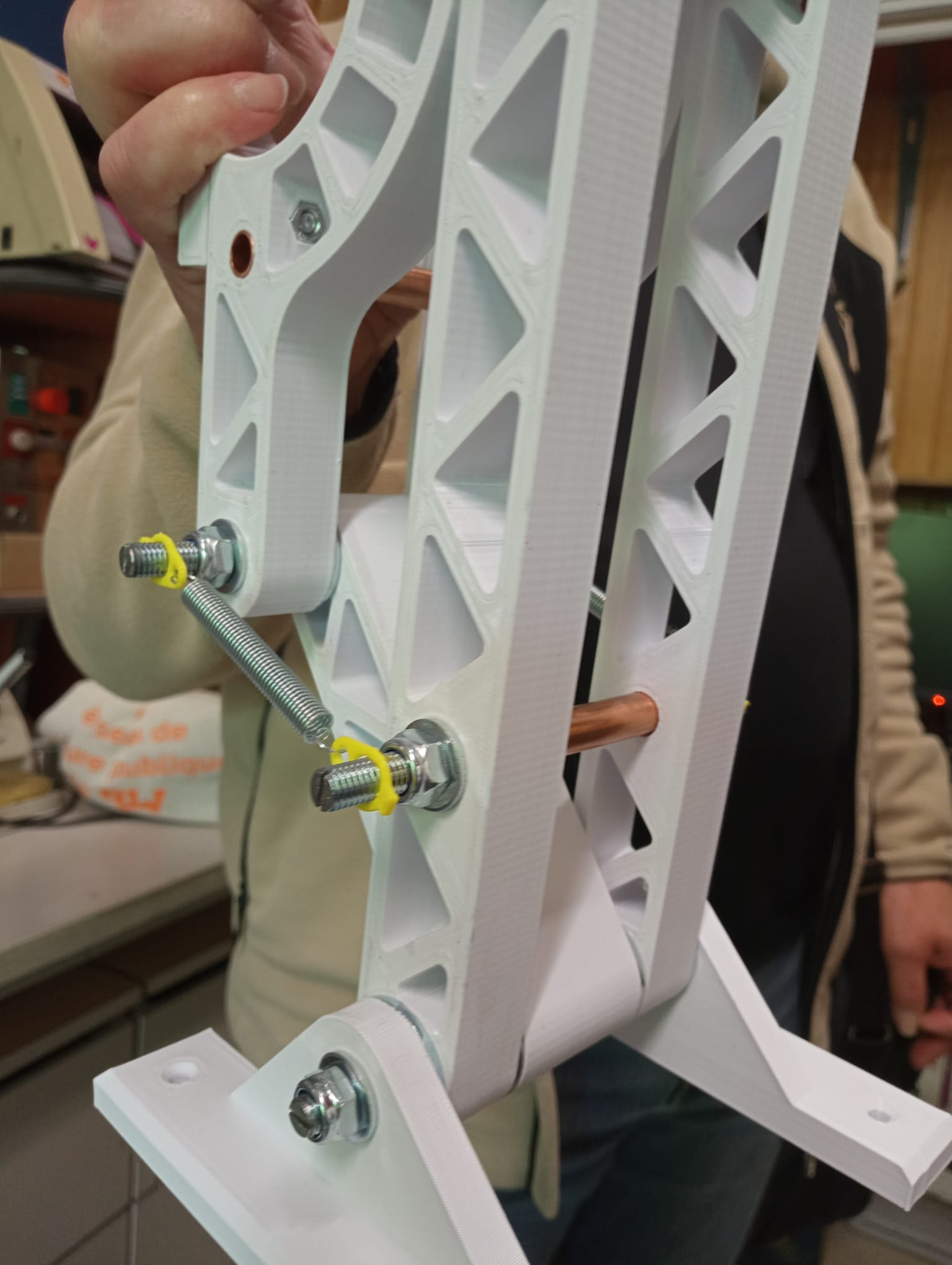
L = longueur d’un bras du pantographe. Le pantographe est composé de 2 bras de longueur L et de 2 bras de longueur L/2.
Axe X = axe suivant le plateau de la machine de gauche à droite
Axe Y = axe de la broche d’avant en arrière
Axe Z = axe perpendiculaire au plateau de bas en haut.
(comme sur notre CN)
Dans le plan proposé dans github, Ils utilisent :
- Une longueur de bras de pantographe de longueur L=240mm.
- Une distance Sol/haut plateau de 180mm
- Une grandeur du plateau suivant les X de 400mm.
- Une grandeur de plateau suivant les Y de 315mm
J’ai gardé ces valeurs pour le moment.
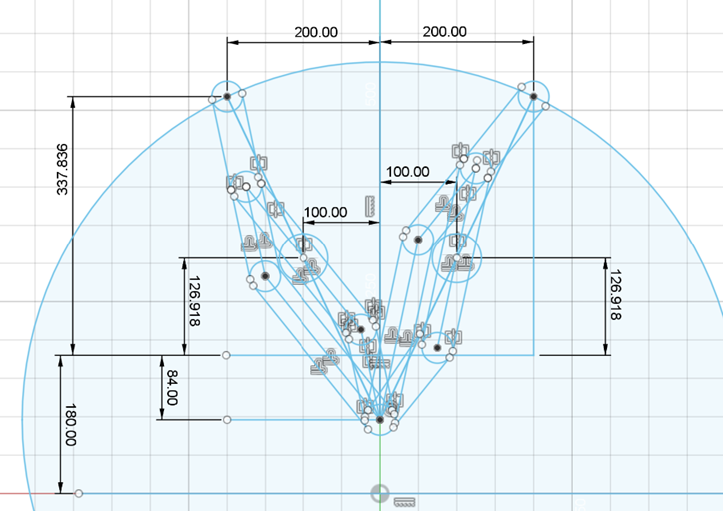
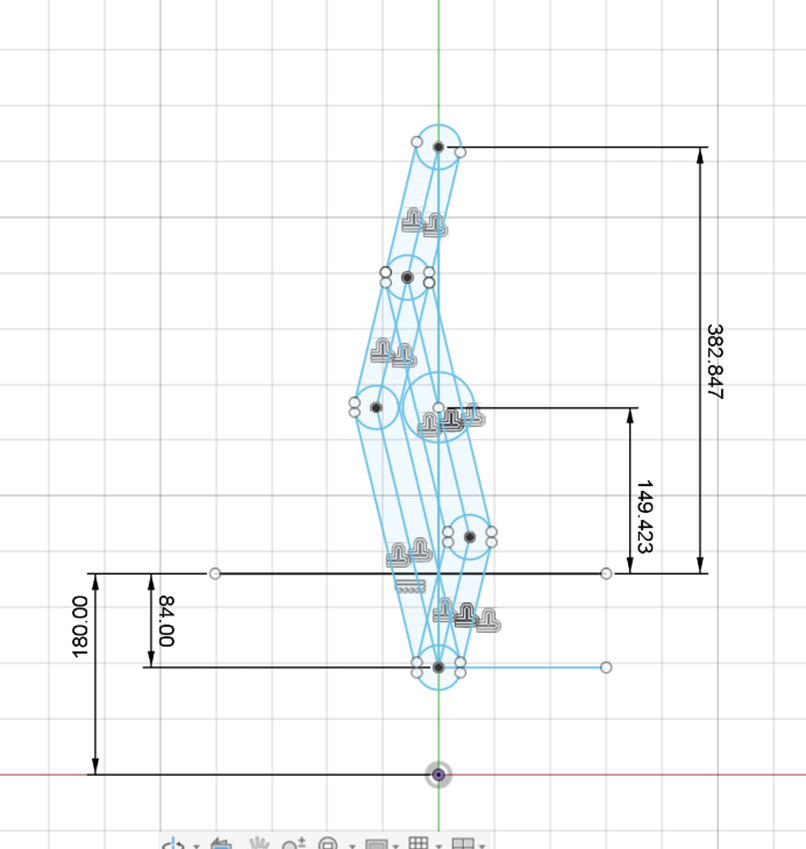
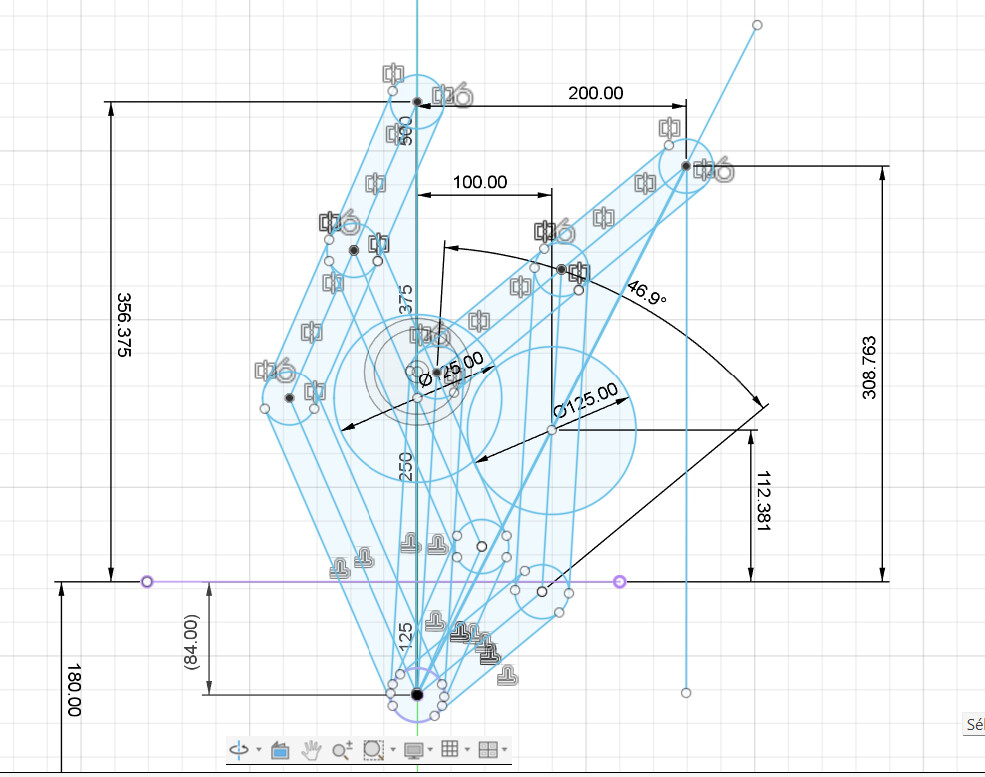
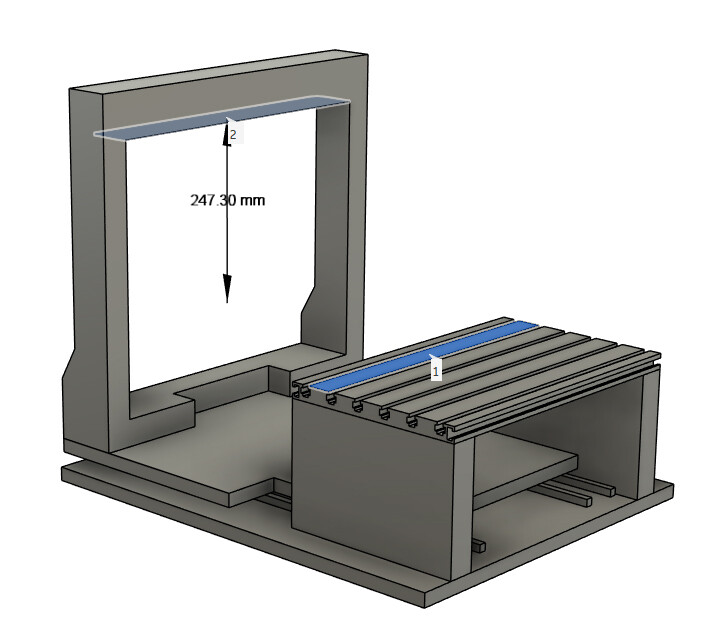
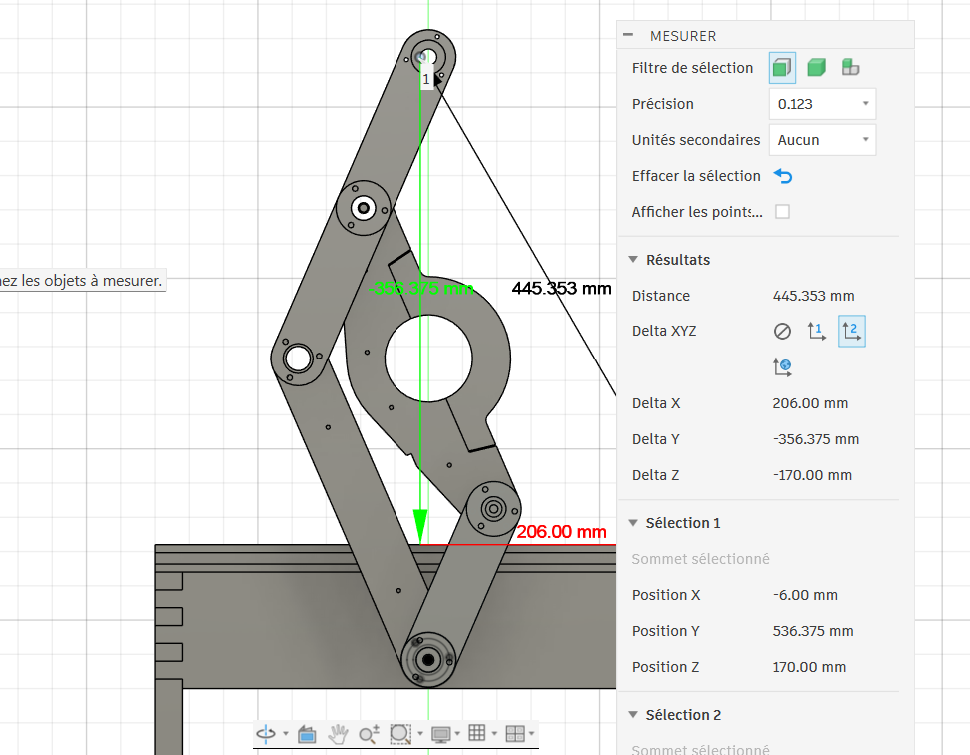
Le premier travail est de positionner le point fixe du pantographe afin de déterminer les capacités maxi de la machine. Après une longue réflexion, j’en suis arrivé à mettre ce point fixe à 84mm en dessous du plateau, ce qui permet d’avoir 4mm de jeu entre le point le plus bas du pantographe et le sol.
En partant de ce principe, en considérant que le point piloté ne dépasse pas la verticale à droite et à gauche du plateau, la capacité de la machine (déplacement de la broche) serait au maximum de 200 (+100 et -100) en X et 127 en Z , le Z maxi du point piloté serait de 338mm (en fait le Z du point piloté pourra aller plus haut jusqu’à 382mm en réduisant la capacité en X jusqu’à 0).
J’ai cherché des composants sur ali et j’ai trouvé :
Un plateau alu de 400X 240mm
Une broche 1500W mandrin ER11 diamètre 64mm
@patrice, Voici la base fusion qui résume ce que je viens d’expliquer. Veux-tu que je crée un compte fusion ACoLab dans lequel je mettrai cette base. Ça te permettrait de pouvoir voir/intervenir sur ce qui se fait. Voire même en s’organisant un minimum, on pourrait se partager le boulot de conception
pantorouter_V0.zip (549,8 Ko)