Ni pour ni contre bien au contraire ![]() . J’ai décroché à la 4e ligne.
. J’ai décroché à la 4e ligne.
 … moi : 2eme
… moi : 2eme 
je suis pas sure de pouvoir passer, dommage.
Je valide raspbian et python, je m’y connais moins en web, mais si Mike dit que c’est bien, je valide aussi 
J’ai commencé un projet là : https://github.com/acolab/acolock
On a pour l’instant juste installé le pi, préparé des bases et testé un programme de lecture de QR Code.
@francois a testé son mécanisme et ça ferme mais ça ouvre pas. L’embrayage se comporte bizarrement dans un sens, il a l’air de bloquer. Il va revoir le mécanisme avec 2 embrayages.
Le montage avec 2 embrayages est réalisé et testé “à vide”.
J’ai alimenté l’ensemble avec l’alim que nous avons récupérée dans les cartons de L’Acolab : 24VCC / 1,85A . Ça cause !
Le couple obtenu est vraiment impressionnant : On ne peut pas bloquer le manchon d’accouplement à la main.
C’est d’ailleurs plutôt ennuyeux car en fin de cycle de rotation, si le moteur fait un quart de tour de trop … Ce sera vraiment le dernier 
Ci-après : Mecanisme_3.fcstd (477,7 Ko)
une petite construction sur FreeCad au cas où on referait les pièces un peu plus précises (à la ShapeOko) que mon proto en photo :

Reste donc à monter le mécanisme sur la plaque déjà présente sur la porte. Il faudra refaire la fixation par rapport à la 1ére version. Pas grave… 2 ou 3 trous en plus, Quelques entretoises un peu plus hautes et ça le fera…
Pour la carte de pilotage du moteur et des 2 embrayages, j’ai utilisé du matériel dispo-récup “Acolab”. avec relais en 24V.
Pour la version définitive “Arduino” il faudrait une carte 4 relais avec optocoupleurs de ce type : En direct de Shenzhen ! C’est le plus simple et sans doute le plus robuste.
J’ai laissé un axe dépassant sur lequel on peut adapter un contrôleur de rotation. Je regarde ce que j’ai dans mes tiroirs…
@francois a installé son prototype et il marche bien :
Reste à faire la partie électronique et logicielle.
Wouah 
Comment se fait l’arrêt en fin de course pour le moment ? A la main ?
Peut-être possible soit de monitorer le courant utilisé par le moteur et d’en déduire qu’on est en fin de course s’il augmente, soit de monitorer (avec un encodeur, par exemple) la rotation effective de l’ensemble lorsque le moteur est alimenté.
Réponse : 
Le pignon de 40 dents qui est solidaire de l’axe entraînant le barillet est monté “serré” sur cet axe.
Le montage n’est pas totalement bloqué et autorise ainsi un glissement en fin de mouvement.
On peut garder ce montage (avec toutefois un risque, dans la durée, de voir le serrage diminuer et de “patiner” durant le cycle ; mais ce n’est pas le cas actuellement), et contrôler l’arrêt en rotation avec un dispositif “générateur d’impulsion” monté en bout d’axe. (type roue récupérée dans les imprimantes).
Oui très bonne idée. Après il faudra voir comment le gérer avec le soft
je propose une sécurité matériel un 74hc590 (compteur) suivi d’un inverseur 74hc04 (inverseur) 74hc30 ( un "et " à 8 entrées).
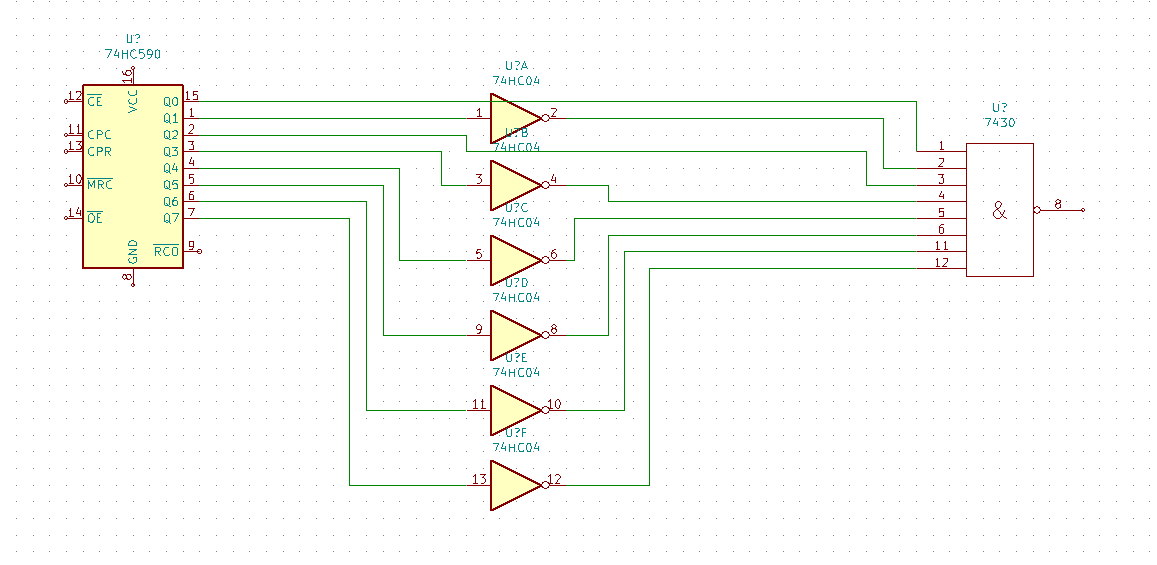
reste qu’il faut réaliser une carte .
explication lorsque l’on arrive à 40 (ce nombre peur changer jusqu’à 256, ça serai l’idéal de trouver un codeur 256).
Sinon j’ai des ACS712 (convertisseur courant tension), suivi d’un comparateur analogique .
.
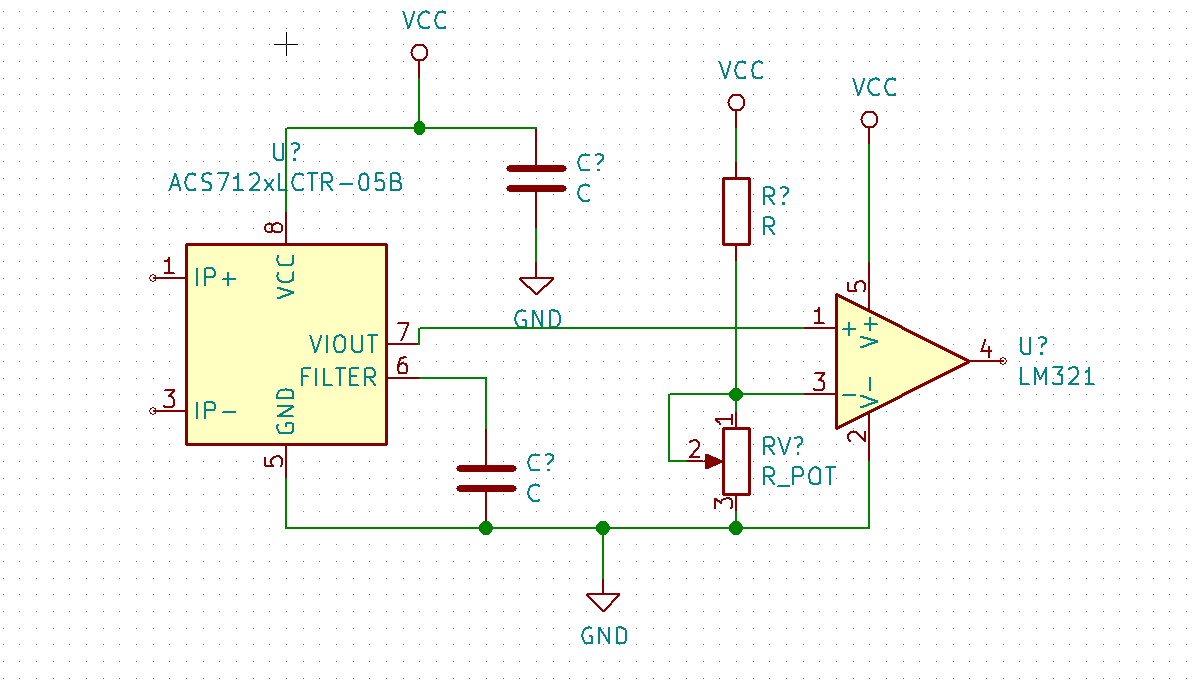
il faudra peut être ajuster les schéma.
a+
peut t-on éditer un poste ( pour corriger de fautes) ?
Oui normalement t’as un menu en dessous du post pour le modifier.
On a récupéré un capteur dans les restes du photocopieur pour compter les tours de l’axe de la serrure (celui qui ne tourne plus quand on est en butée).
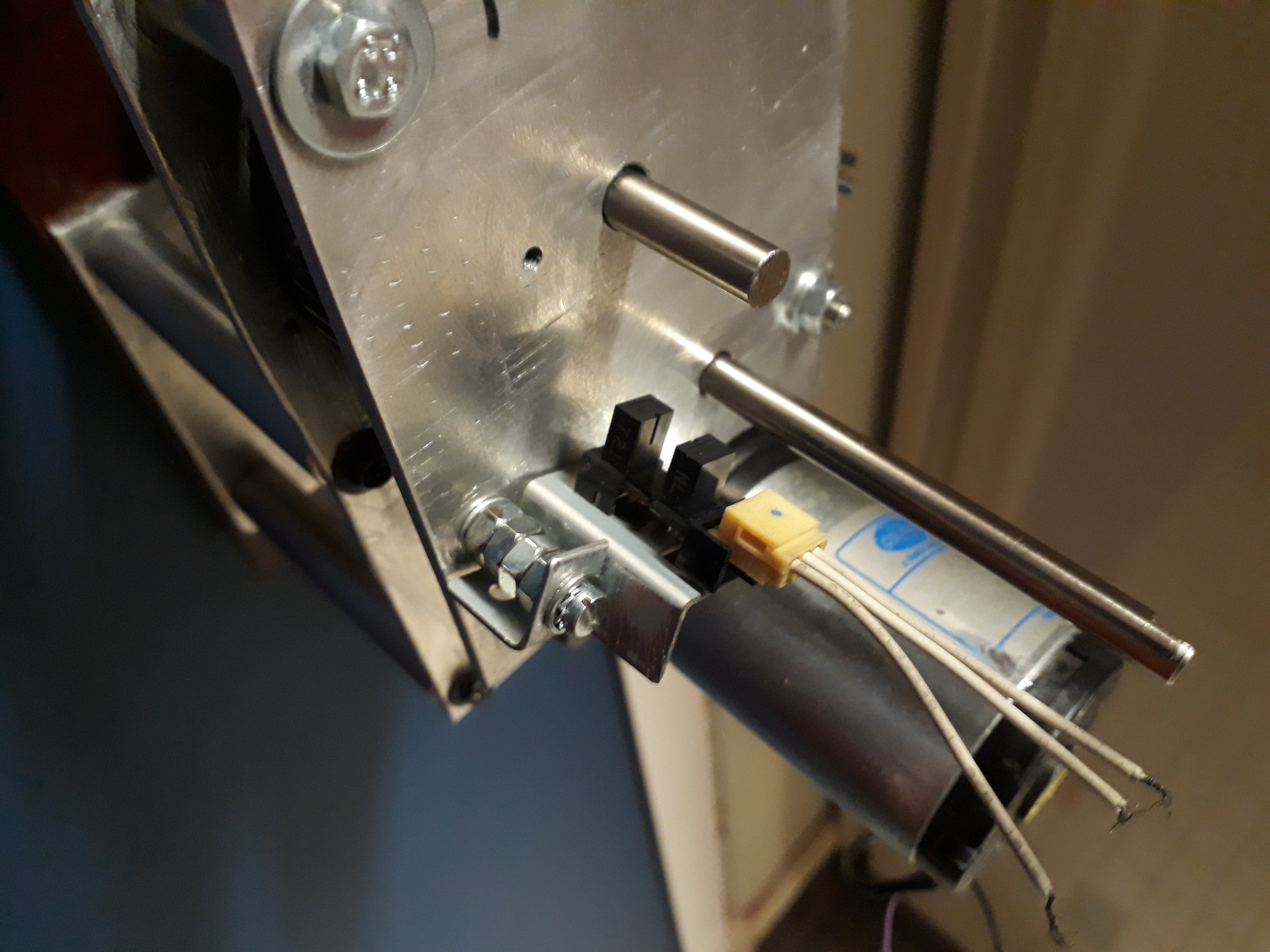
On l’a testé sur le Pi et il se lit bien. J’ai essayé avec des interruptions, mais la détection ne marche pas super bien (pas très réactif et pas très fiable). Avec du polling ça marche très bien par contre, donc on fera probablement avec ça.
On prévoit de compter des quarts de tours pour voir si on est en butée, donc le Pi aura largement le temps de voir les changements.
Il faudra un régulateur 5V pour alimenter le Pi, ou qu’il ait sa propre alim dans un premier temps.
Je vais commander la carte relai mentionnée plus haut. Et un dongle wifi, peut être lui :
J’ai reçu la carte relais.
C’est pas toujours évident de trouver du temps pendant les ouvertures pour avancer sur le projet, donc je proposerais bien de faire une session spéciale, un peu en mode hackathon. L’objectif serait d’arriver à un truc fonctionnel à la fin de la session (et éventuellement de l’améliorer lors d’autres sessions).
Ça vous dit ? À ceux qui voudraient participer (ou même juste observer ?) qu’est-ce qui vous arrangerait le plus ? Un dimanche ? Une fin de journée en semaine? Un samedi en parallèle ou à la place de l’ouverture ? Autre chose ?
Pour moi, le samedi me va bien, mais je me cale sur les autres sans problème…
Pareil le samedi ou en soirée jeudi/vendredi /samedi
On va avancer dessus samedi pendant l’ouverture et probablement après.
On a un peu avancé, mais il semblerait qu’on ait collé un des relais. Il faut qu’on revoit le montage.
Il y a une 2e carte relais dans le carton que j’avais pris pour moi qu’on pourra utiliser quand on aura un montage qui ne colle plus
Il faut mettre une diode de roue libre au borne du moteur (la cathode au plus du moteur et l anode au moins)